This project demonstrates an innovative approach to interfacing with HD44780 LCD displays using the Serial Peripheral Interface (SPI) protocol instead of traditional parallel communication. By leveraging a 74HC595 shift register, this proof-of-concept reduces the number of required wires from 8-10 down to just 3-4, making it ideal for microcontrollers with limited GPIO pins.
The entire implementation is bare-metal C++ with no external LCD libraries, providing complete control over hardware timing and communication protocol details—perfect for learning how microcontrollers communicate with peripherals.
The system is built around the Arduino Uno (ATmega328P) and uses a 74HC595 shift register as the interface layer between the microcontroller's SPI bus and the HD44780 LCD.
Arduino Uno (SPI: MOSI, SCK, SS)
↓ Serial Data Stream
74HC595 Shift Register
↓ Parallel Output
HD44780 LCD Display
↓ Visual Output
16x2 Character Display
This project implements the HD44780 4-bit mode over SPI, which is particularly clever:
Each byte sent over SPI contains:
Bit 0 (Q0): RS (Register Select) - 0=Command, 1=Data
Bit 1 (Q1): Enable - Pulse signal for LCD latch
Bits 2-3 (Q2-Q3): Unused/Reserved
Bits 4-7 (Q4-Q7): Data Lines (D4-D7) for 4-bit mode
This clever bit packing means a single 8-bit transfer contains both control signals and data. The LCD latches data on the falling edge of the Enable signal.
The firmware is structured with clean separation of concerns:
sendNibble(byte nibble, bool rs) - Low-level SPI driver
sendByte(byte value, bool rs) - Mid-level data formatter
sendNibble() twice with proper timing delayslcdCommand(byte cmd) - Command interface
lcdWrite(char c) - Character output
lcdPrint(const char* str) - Text output
lcdSetCursor(byte col, byte row) - Cursor positioning
lcdInit() - Initialization sequence
All timing values optimized for HD44780 compatibility:
| Parameter | Value | Purpose |
|---|---|---|
| SPI Clock Speed | 500 kHz | Fast enough for LCD, stable for shift register |
| Enable Pulse Width | 2 μs | Minimum pulse needed to latch data |
| Nibble Delay | 100 μs | Delay between high and low nibbles |
| Character Delay | 50 μs | Time after sending full character |
| Command Delay | 2 ms | Standard delay after commands |
| Clear/Home Delay | 3 ms | Special delay for clear/home commands (0x01, 0x02) |
| Power-up Delay | 50 ms | LCD stabilization after power |
These tight specifications were established through testing and ensure reliable operation across different LCD variants.
The demonstration firmware displays:
This can be easily customized in the setup() function for different applications.
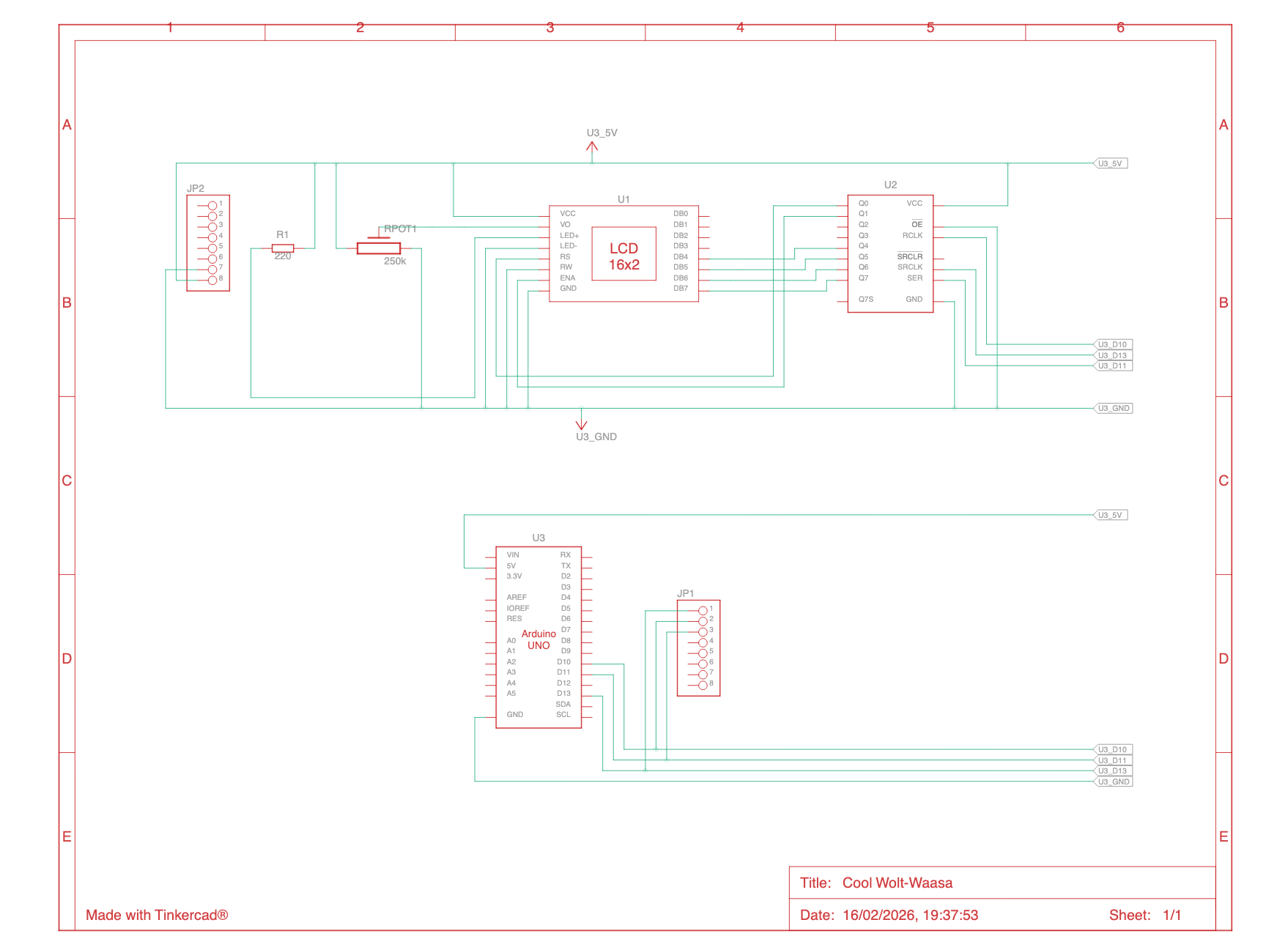
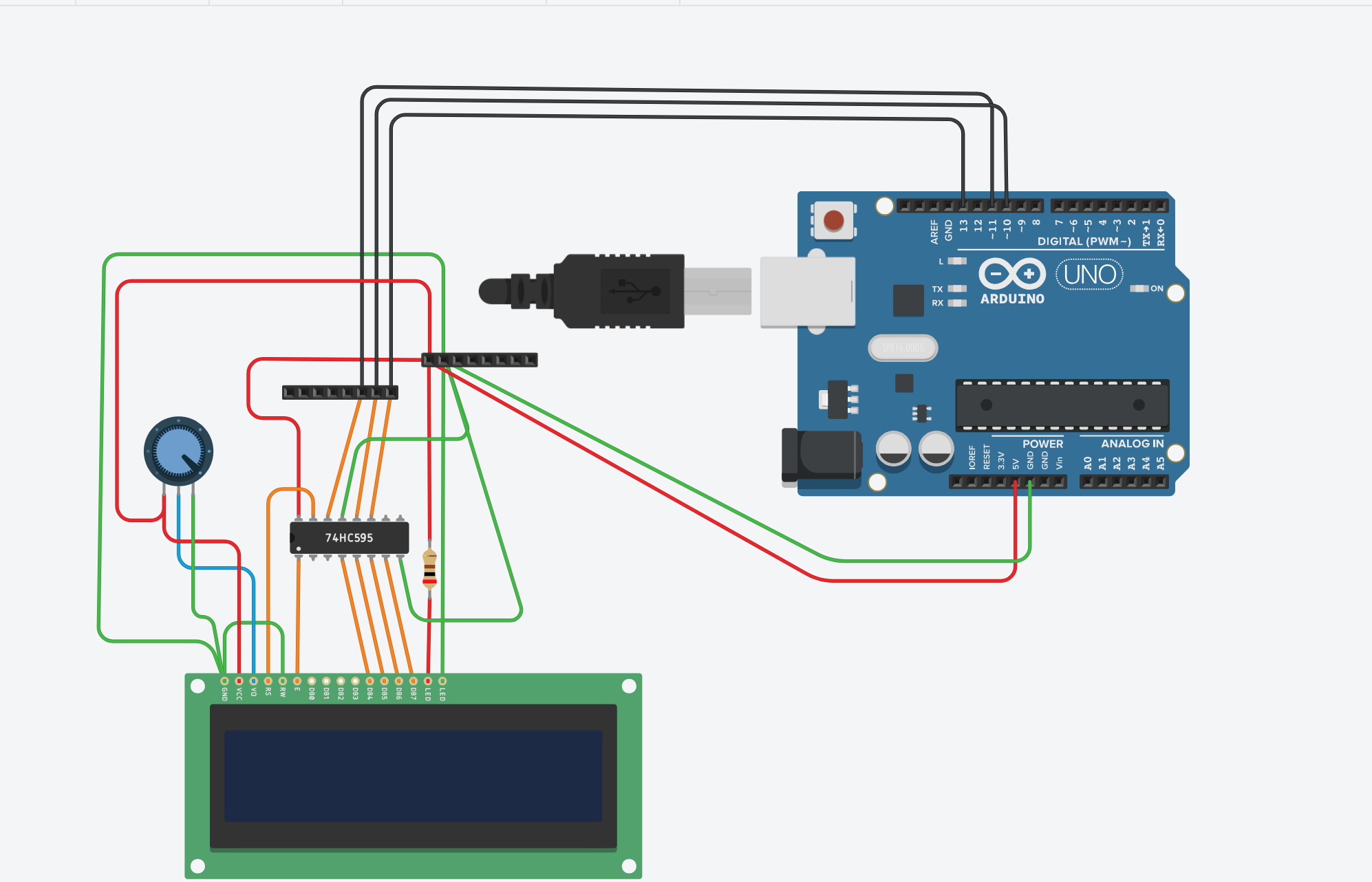
The schematic shows the complete wiring:
SPISettings SPI_SETTINGS(500000, MSBFIRST, SPI_MODE0);| Metric | Value |
|---|---|
| Text Display Speed | ~6 characters/second (with delays) |
| Cursor Positioning | ~2 milliseconds |
| Display Refresh | Full 32-character update in ~64 milliseconds |
| Power Consumption | ~80mA (Arduino + LCD) |
This approach is ideal for:
The architecture supports several enhancements:
The firmware has been tested for:
Note: Timing specifications may require fine-tuning for component variations (different LCD batches, shift register brands).
✓ Shift register approach reduces wiring complexity significantly
✓ SPI 500kHz speed is stable and reliable for LCD communication
✓ 4-bit mode is the right balance between complexity and performance
✓ Bare-metal implementation provides excellent learning opportunity
⚠ Challenge: Initial timing issues with enable pulse
✓ Solution: Implemented 3-step pulse sequence with microsecond-level precision
⚠ Challenge: 4-bit mode initialization sequence
✓ Solution: Used proven HD44780 reset sequence (three 0x30 nibbles, then 0x20) with proper delays
⚠ Challenge: Noisy SPI communication on first attempts
✓ Solution: Added proper SPI transaction handling and SS pin control
This project successfully demonstrates that SPI can be an effective alternative to parallel interfaces for LCD displays. While not faster than direct parallel connection, the significant reduction in wiring (4 wires vs 11) makes it valuable for Pin-constrained applications.
The bare-metal implementation provides a deep understanding of protocol-level communication, shift register operation, and real-time embedded programming—making it an excellent educational resource for electronics enthusiasts and embedded systems learners.
Perfect for: DIY enthusiasts, engineering students, and anyone wanting to understand low-level hardware control.
Status: Proof of Concept / Experimental
Last Updated: February 2026
Maturity Level: Educational / Learning Tool
License: Open Source (Shareable for Educational Purposes)