Smart Weeding Robot
FlutterArduinoC++BluetoothIoT
Overview
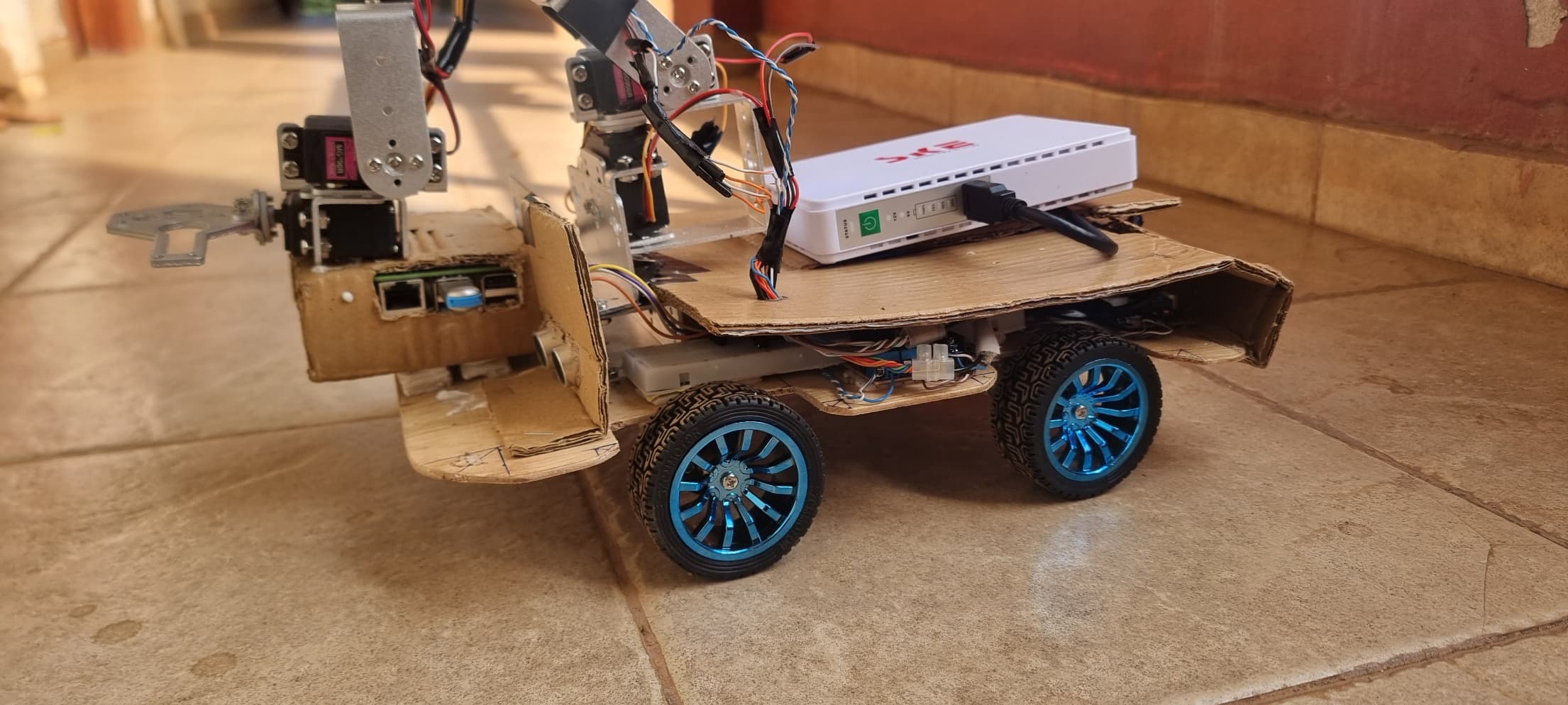
This project is an agricultural robotics solution designed to automate weeding operations. Developed by a team of students from Makerere University, the system consists of a 4-wheel drive rover equipped with a 6-degree-of-freedom robotic arm, all controlled via a custom-built Flutter mobile application.
The Development Team
- Wangoda Francis (Lead/CTO)
- Mujuni Innocent
- Namuli Angel Rebecca
- Bwanika Robert
- Nalugo Linda
Key Features
- 4WD Movement: Tank-drive steering with variable speed control using L298N drivers.
- 6-DOF Arm: Inverse kinematics for precise gripper placement using MG996R servos.
- Computer Vision: Live video feed integration for remote monitoring.
- Safety First: Ultrasonic collision avoidance and emergency stop protocols.
The Tech Stack
The mobile app is built with Flutter to ensure cross-platform compatibility. It handles Bluetooth Serial communication to send byte-packets to the robot. The robot runs on an Arduino Mega 2560 with C++ drivers code for PWM motor control and sensor management.